


输尿管梗阻(ureteral obstruction,UO)是泌尿外科常见疾病之一,发病率约为1/1 500,多由输尿管壁内部狭窄或外部受压引起输尿管内尿液运输受阻,造成病变近端尿液潴留的尿路梗阻[1-2]。主要病因包括手术瘢痕粘连、输尿管结石、输尿管先天性狭窄、恶性肿瘤压迫和腹膜后纤维化[3]。UO早期较隐匿,常无明显症状,多因长期梗阻导致肾积水,出现肾绞痛、血尿、发热和腹部包块等症状而被发现。少数患者可有肾性高血压、贫血等症状。同时,输尿管长期梗阻易继发尿路感染和上尿路结石,严重者可引起肾实质损害,导致肾功能不可逆受损,甚至使肾脏处于无功能状态[4]。
UO的一般治疗策略是解除梗阻,恢复输尿管通畅性,常见治疗方法有保守治疗、介入治疗、手术治疗[5]。手术治疗包括开放手术、腹腔镜手术(operative laparoscopy,OL)和机器人辅助腹腔镜手术(robot assisted laparoscopic surgery,RALS)。1992年Nezhat等[6]开展了第一例腹腔镜下输尿管重建术,标志着腹腔镜开始应用于治疗输尿管狭窄。如今,OL已经成为UO手术治疗首选方式,但Simmons等[7]在回顾性比较OL与开放手术重建输尿管后指出,OL由于视野和器械运动受限导致体内缝合困难,手术操作者需要更多的术中缝合时间和较高的手术技能。近年来,机器人平台被广泛应用于泌尿外科领域,其具有手术视野高清立体、机械臂操作灵活平稳等特点,使以往高精度、高难度手术方案成为可能。RALS克服了传统OL的技术复杂性难题,尤其是降低了缝合和打结难度,使机器人在UO的手术治疗中颇受临床医师的青睐[8]。查阅已有文献发现相关研究较少,且选择的结局指标不够全面。为了综合更多证据来证实RALS在治疗UO的作用,评估方案的有效性和安全性,本研究拟扩大检索国内外主流数据库,并纳入更多结局指标进行更全面的meta分析,以期为临床决策提供强有力的循证支持。
1 方法
本研究依据系统评价和meta分析首选报告项目(PRISMA)指南设计实施[9],并已在PROSPERO官网上注册,注册号为CRD42024578054。
1.1 检索策略
检索中国知网、万方数据知识服务平台、维普网、中国生物医学文献数据库、PubMed、Embase、Cochrane Library、Web of Science数据库,限制文献时间范围为各数据库建库到2024年8月8日。采用“主题词+自由词”结合形式进行检索,中文检索词为“输尿管”“梗阻”“机器人辅助手术”“机器人外科手术”,英文检索词为“Ureter”“Obstruction”“Robot Assisted Surgery” “Robotic Surgical Procedure”。同时在已发表系统综述的参考文献中进行二次检索,以确保检索文献尽可能全面。以PubMed为例,简要检索策略如下:
#1 Ureter[Mesh Terms]
#2 Ureter OR Obstruction[Title/Abstract]
#3 #1 OR #2
#4 Robot Assisted Surgery[Mesh Terms]
#5 Robot Assisted Surgery OR Robotic Surgical Procedure[Title/Abstract]
#6 #4 OR #5
#7 #3 AND #6
1.2 文献筛选
纳入标准:①研究对象为UO患者;②研究内容是RALS治疗UO对比OL治疗UO;③研究类型为前瞻性研究或回顾性研究;④结局指标包括本研究分析指标中的任一项。
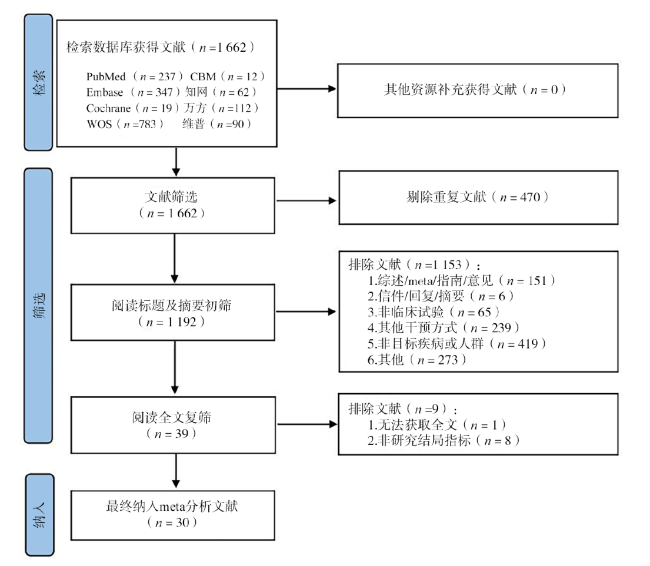
排除标准:①综述、病例报告、研究方案或会议论文;②重复和无法获取全文的研究;③数据不完整的研究;④无法提取结局指标的研究。
2名研究者按照上述标准独立筛选文献,研究筛选过程中遇到的不同意见通过讨论或由第三名研究者解决。
1.3 数据提取和质量评估
1.4 研究指标
研究的主要指标包括术中出血量、手术时间、住院时间、并发症、成功率、引流管留置时间、术中吻合时间、输尿管支架留置时间、术中缝合时间、住院费用、二次手术率。
1.5 统计学方法
采用Stata 15.0进行meta分析。对于连续型数据,使用计算加权均数差(weighted mean differences, WMD)并报告95%置信区间(confidence interval,CI)。对于二分类变量,采用比值比(odds ratio,OR)作为效应指标进行分析。采用Q检验(用于检验异质性是否存在)和I 2统计量(用于量化异质性比例)评估研究之间的异质性,如果I 2<50%,使用固定效应模型(Mantel-Haenszel法)进行meta分析,反之,使用随机效应模型(DerSimonian-Laird法)。采用敏感性分析评估meta分析结果的稳健性。使用漏斗图和Egger检验(研究数量≥10篇)评估纳入文献是否存在发表偏倚。以双侧P < 0.05为差异有统计学意义。
2 结果
2.1 文献检索
2.2 纳入研究的基本特征及质量评价
表1 纳入研究基本信息表Table 1 Basic information table for included studies |
| 第一作者 | 发表年份 | 国家 | nRALS组/ nOL组 | 年龄/岁 | 男/女 | 是否RCT | 结局指标 | 文献 质量a | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RALS组 | OL组 | RALS组 | OL组 | ||||||||
| 汪仁昊[12] | 2024 | 中国 | 30/26 | 30.00±17.04 | 26.00±10.00 | 16/14 | 18/8 | 否 | ①②③⑥ | 19 | |
| 蒋昊[13] | 2017 | 中国 | 48/69 | 28.71±10.13 | 30.12±12.65 | 27/21 | 39/30 | 否 | ①②③④⑥ | 20 | |
| 刘祺[14] | 2023 | 中国 | 31/32 | 4.78±3.93 | 4.17±3.42 | 22/9 | 26/6 | 否 | ①②③④⑥⑩ | 21 | |
| 赵冬艳[15] | 2022 | 中国 | 10/8 | 0.75±1.91 | 0.83±1.23 | — | — | 否 | ②③⑥⑩ | 20 | |
| 刘慧[16] | 2023 | 中国 | 22/48 | 7.04±3.32 | 5.96±7.00 | 18/4 | 37/11 | 否 | ①②③④⑦⑩ | 20 | |
| 郑霁[17] | 2014 | 中国 | 32/46 | 28.90±35.56 | 29.80±41.48 | 20/12 | 30/16 | 否 | ①②③④⑤ | 20 | |
| Kobayashi[18] | 2020 | 日本 | 6/26 | 23.00±8.15 | 26.00±45.93 | 4/2 | 14/12 | 否 | ①②③④⑤⑧ | 18 | |
| Hu[19] | 2023 | 中国 | 32/30 | 1.41±0.84 | 1.40±0.77 | 22/10 | 20/10 | 否 | ②③④⑥⑩ | 21 | |
| Ebert[20] | 2020 | 美国 | 119/115 | 6.80±13.33 | 6.20±16.37 | 83/36 | 80/35 | 否 | ②③④⑪ | 18 | |
| Patel[21] | 2016 | 美国 | 55/13 | 7.30±6.59 | 7.30±7.19 | 36/19 | 9/4 | 否 | ②③④ | 21 | |
| Weise[22] | 2006 | 美国 | 31/14 | 26.00±37.04 | 24.50±41.48 | 13/18 | 6/8 | 否 | ②③④⑤ | 21 | |
| Esposito[23] | 2019 | 意大利 | 37/30 | 7.60±8.15 | 2.70±2.47 | 24/16 | 15/12 | 否 | ②③④⑤⑦⑪ | 19 | |
| Fiori[24] | 2017 | 意大利 | 15/12 | 39.70±10.80 | 41.10±11.60 | 8/7 | 1/11 | 否 | ②③④⑥⑦⑧⑨ | 20 | |
| Riachy[25] | 2012 | 美国 | 46/18 | 8.80±15.99 | 8.10±13.15 | 23/23 | 14/4 | 否 | ②③④⑤ | 20 | |
| González[26] | 2022 | 美国 | 174/86 | 8.90±11.11 | 10.50±11.11 | 79/95 | 55/31 | 否 | ②③ | 20 | |
| Sun[27] | 2019 | 中国 | 65/61 | 46.29±12.66 | 45.70±12.15 | 40/25 | 43/18 | 否 | ②③④⑨ | 19 | |
| Silay[28] | 2019 | 德国 | 26/27 | 3.00±12.28 | 1.50±7.96 | 17/9 | 18/9 | 是 | ②③④⑤ | 低风险 | |
| Sun[29] | 2023 | 中国 | 12/21 | 1.42±1.91 | 0.75±2.10 | — | — | 否 | ②③⑤⑥⑩ | 21 | |
| Neheman[30] | 2017 | 以色列 | 21/13 | 0.48±0.64 | 0.52±0.27 | 10/11 | 10/3 | 否 | ②③④⑤ | 20 | |
| Bird[31] | 2010 | 美国 | 98/74 | 39.60±15.20 | 39.78±13.90 | 46/52 | 35/39 | 是 | ②④⑤⑨ | 低风险 | |
| Rasool[32] | 2019 | 印度 | 34/34 | 29.29±11.14 | 31.06±14.05 | 24/10 | 18/16 | 否 | ①②③④ | 20 | |
| Bernie[33] | 2005 | 美国 | 7/7 | 32.00±17.78 | 34.00±27.41 | — | — | 否 | ①②③④ | 19 | |
| Tatenuma[34] | 2023 | 日本 | 18/104 | 37.50±52.59 | 38.00±50.37 | 10/8 | 48/56 | 否 | ①②④⑤⑨ | 20 | |
| Griessner[35] | 2020 | 奥地利 | 36/27 | 48.42±18.40 | 47.00±20.70 | 19/17 | 15/12 | 否 | ②③④ | 20 | |
| Link[36] | 2006 | 美国 | 10/10 | 46.50±16.90 | 38.00±14.00 | 3/7 | 4/6 | 是 | ② | 低风险 | |
| Zhang[37] | 2019 | 中国 | 28/34 | 47.29±12.13 | 47.53±12.06 | 9/19 | 13/21 | 否 | ②③④⑤⑨ | 19 | |
| Lukkanawong[38] | 2022 | 日本 | 12/13 | 29.00±43.70 | 23.00±37.04 | 8/4 | 7/6 | 否 | ①②③④⑥ | 19 | |
| Andolfi[39] | 2022 | 美国 | 39/26 | 0.33±0.25 | 0.25±0.31 | 30/9 | 22/4 | 否 | ②③④⑤ | 21 | |
| Zi[40] | 2023 | 中国 | 35/101 | 35.77±11.77 | 40.46±12.10 | 20/15 | 53/48 | 否 | ①②③④⑤⑩ | 20 | |
| Hemal[41] | 2010 | 印度 | 30/30 | 24.85±37.04 | 28.10±25.93 | 20/10 | 21/9 | 否 | ①②③⑨ | 20 | |
注:RALS组为机器人组,OL组为传统腹腔镜组;①术中出血量,②手术时间,③住院时间,④并发症,⑤成功率,⑥引流管留置时间,⑦术中吻合时间,⑧输尿管支架留置时间,⑨术中缝合时间,⑩住院费用,⑪二次手术;aRCT采用RoB 2评估偏倚风险,非RCT采用MINORS量表评估方法学评分。 |
文献质量评价显示27项非RCT研究中,有22项的MINORS量表得分20分及以上;3项RCT研究的偏倚风险均为低风险,说明纳入的高质量研究较多。
2.3 主要结局指标meta分析结果
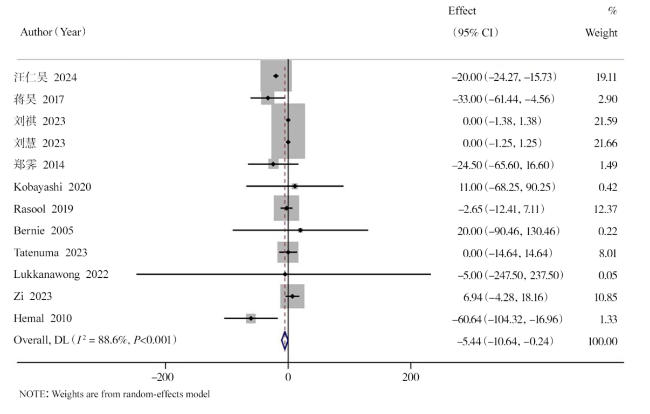
2.3.1 术中出血量
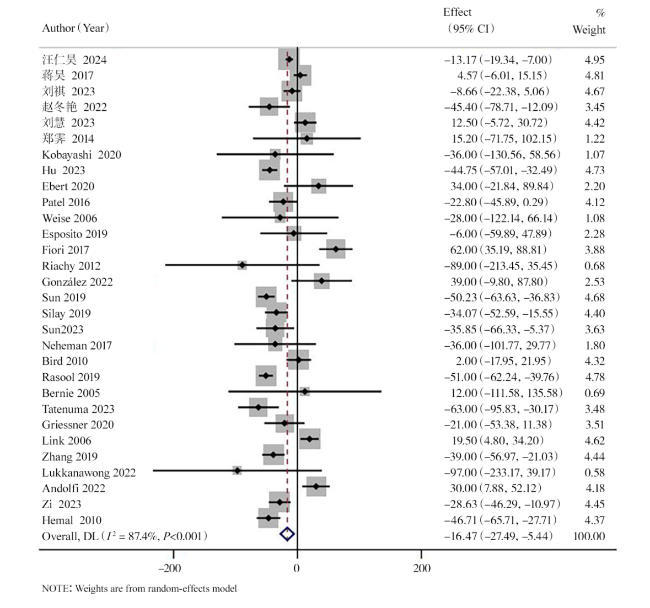
2.3.2 手术时间
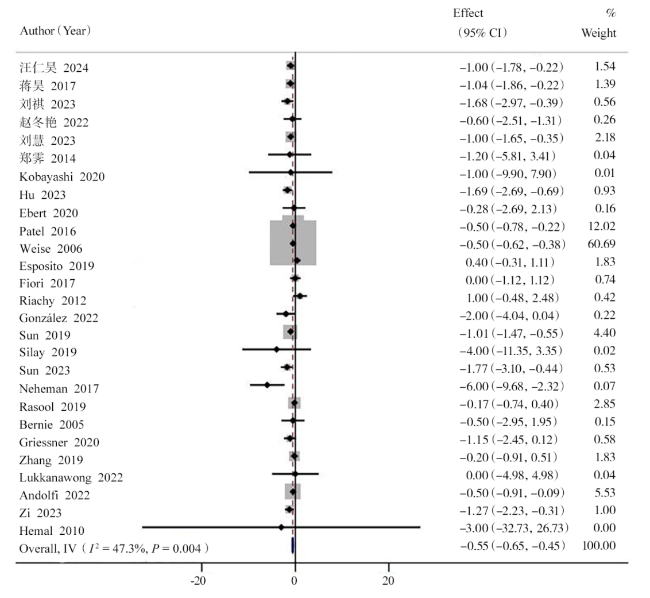
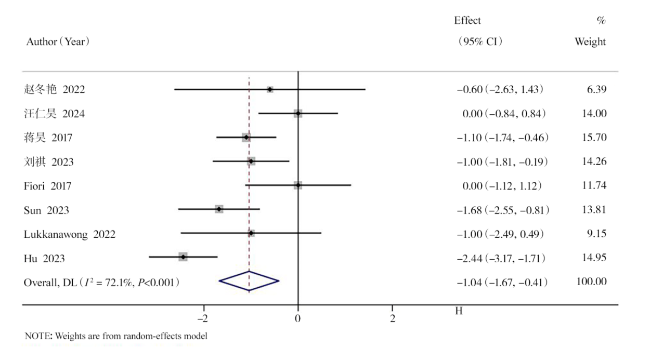
2.3.3 住院时间
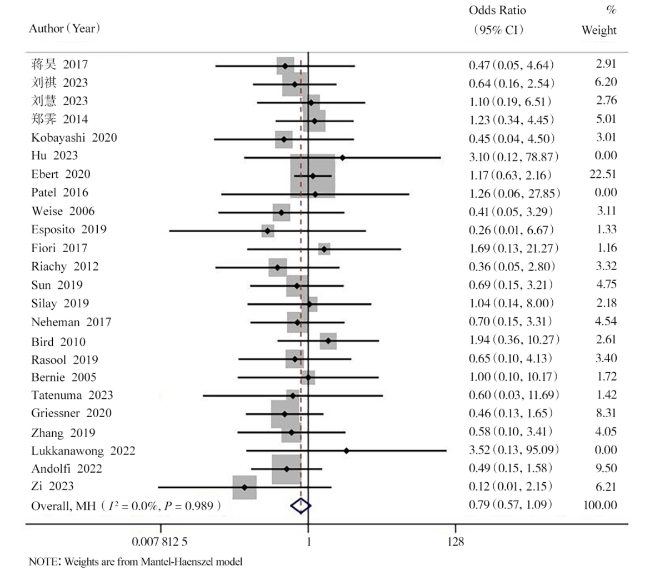
2.3.4 并发症
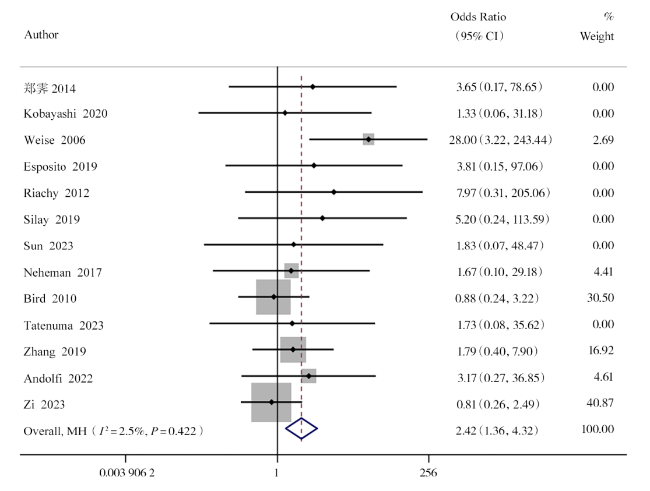
2.3.5 成功率
2.3.6 引流管留置时间
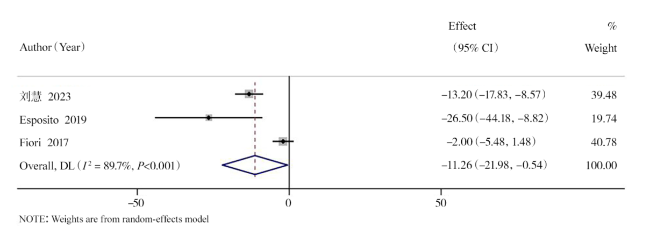
2.3.7 术中吻合时间
2.3.8 输尿管支架留置时间
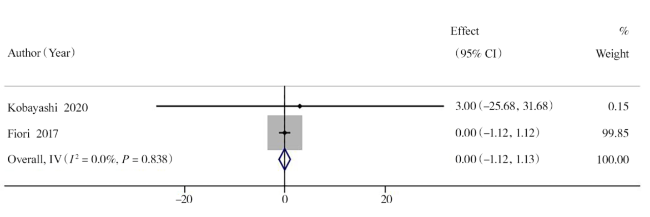
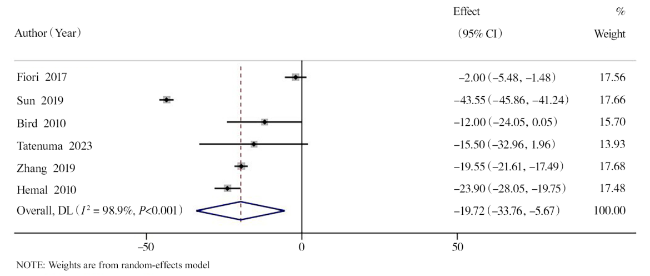
2.3.9 术中缝合时间
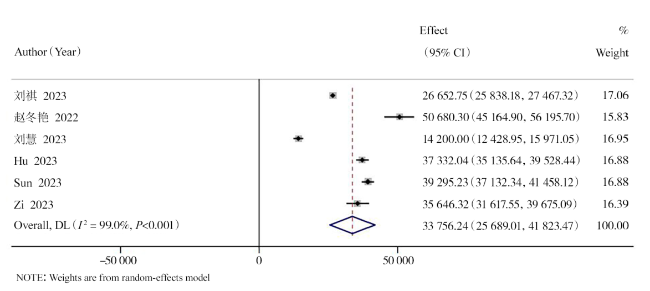
2.3.10 住院费用
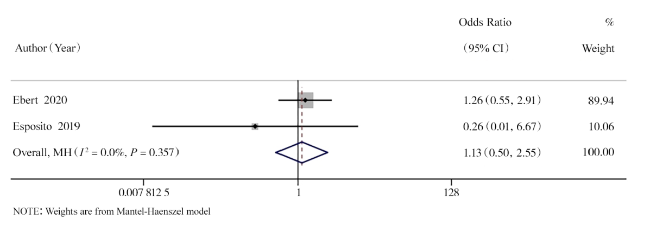
2.3.11 二次手术率
2.4 敏感性分析
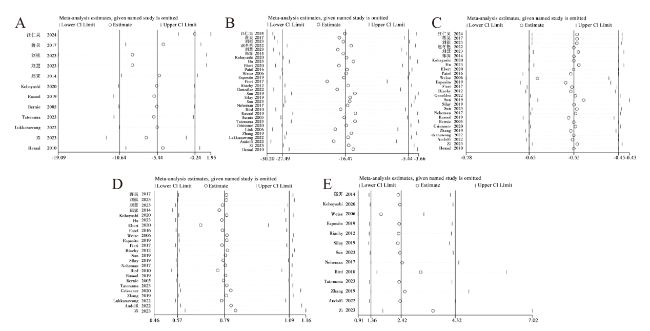
本研究对主要结局指标术中出血量、手术时间、住院时间、并发症、成功率分别进行敏感性分析,通过逐一排除法评估各项研究对汇总结果的影响。分析结果表明,以上5个结局指标依次剔除单个研究后重新进行数据合并分析,合并结果均未受到任何单个研究的显著影响,表明本研究分析的结果总体上是相对可靠的,见图13。
2.5 发表偏倚
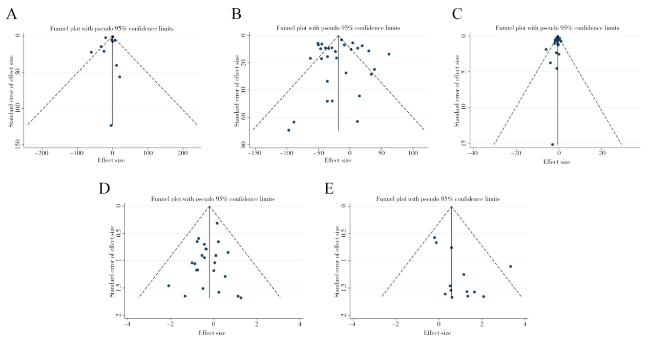
本研究对具有10篇及以上文献的结局指标(术中出血量、手术时间、住院时间、并发症、成功率)使用漏斗图和Egger’s检验来识别发表偏倚。结果显示,术中出血量(Egger’s检验P = 0.250)、手术时间(P = 0.917)、住院时间(P = 0.08)、并发症(P = 0.254)的漏斗图展现出对称分布,且研究集中分布在上方,说明各研究之间无或低发表偏倚,而成功率(Egger’s检验P = 0.04)的漏斗图展现出不对称性,且较多研究分散分布在下方,可能存在发表偏倚。进一步对结局指标成功率行剪补法,结果未发生逆转,因此合并结果稳健。见图14。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
3 讨论
UO是泌尿外科常见疾病之一,常导致肾盂至输尿管间尿流受阻,继而发生肾积水及肾功能减退,甚至可造成永久性肾损伤[42]。OL因其创口小、术后下地速度快的特点,是UO手术治疗的首选方式,但OL存在操作复杂、缝合技巧门槛高和学习曲线较长等问题[43-44]。如今,机器人辅助手术为UO的治疗带来了新选择。相比于OL,RALS能够在受限空间内实现精准操作,减少人为误差,提高手术精度和安全性,还可以缩短学习曲线[45]。本meta分析结果显示,机器人组的术中出血量、手术时间、住院时间、引流管留置时间、术中吻合时间和术中缝合时间均比传统腹腔镜组少,成功率更高,但机器人组的住院费用较传统腹腔镜组高,结果均具有统计学差异。并发症、输尿管支架留置时间、二次手术结果无统计学意义。
研究显示RALS不仅可以节约手术时间,提高手术效率和手术质量,还可减少术中损伤,降低需要输血的可能性,扩大了手术适应症范围。这可能是因为机器人平台具有高分辨率的三维立体成像、高精细度的震颤过滤等优势,能够辅助主刀医师完成更多精细的、复杂的手术操作,使术中分离组织时损伤较少,节省手术时间,减少术中出血量[46]。代鑫等[47]通过meta分析对比达芬奇机器人与传统腹腔镜手术在胰十二指肠切除术的疗效及安全性,得出达芬奇机器人手术系统灵活、精细的操作优势可以减少手术失血量,缩短手术时间,且这种手术方式安全可行,与本研究结果相似。因此,临床医师在面对高精度、高难度手术时可以选择RALS,如手术易损伤邻近组织器官、缝合难度高的小儿UO。
采用卫生经济学模型,计算增量成本效益比发现,机器人组的高费用主要源于设备成本和维护费用[51]。机器人手术系统零件多,购置费用高,需要专业技术人员定期维护,且操作医师需要进行专项培训才能熟练掌握操作技巧,这部分成本会在一定程度上计算入患者手术费用中。同时,机器人手术暂未纳入我国医保政策,需要患者自费承担,故费用高于OL。相信未来随着技术设备发展及费用降低,机器人手术系统将会在国内普及,让更多的患者从中获益。
机器人组与传统腹腔镜组相比,输尿管支架留置时间、并发症发生率、二次手术发生率结果均无统计学差异,可能原因为RALS和OL只是术中的操作方法不同,且并发症不仅局限于术中操作,还受多种因素影响,如围术期护理策略。临床上,输尿管支架留置时间常取决于医师的经验,大多会选择间隔较长的固定日期拔出,避免手术缝合处再次形成梗阻。同时输尿管支架留置时间还受患者自身因素影响,如患者常未按规定时间前往医院拔除。RALS二次手术发生率高,可能是因为医师操作机器人经验不足导致手术质量不佳,需要处理术后漏尿和输尿管支架留置相关的并发症。
本研究仍存在以下不足:①纳入的RCT类型研究较少,因为UO手术治疗的特性,研究过程难以采用盲法和分配隐藏,可能会带来不必要的误差;②部分结局指标受样本量限制,仍需纳入更多研究以提高可信度,如输尿管支架留置时间;③受研究种族、国家、纳入标准、术者经验、随访时间等差异影响,部分研究间的异质性较大,且因样本量限制难以进行亚组分析;④纳入研究部分数据缺失,联系原作者后,未获得原作者回复,但这些数据不影响meta分析结果。
综上所述,在UO治疗中,RALS相比OL术中出血量少,手术操作时间、住院时间、引流管留置时间、术中吻合时间和缝合时间均短,成功率高。表明RALS的临床应用价值较高,能够提高手术效率和加快患者术后恢复速度,适合用于高难度、高要求的精细手术,但其费用较高。未来仍需要更多大样本、前瞻性的随机性对照试验来进一步验证和支持本研究结果。
利益冲突声明:本研究未受到企业、公司等第三方资助,不存在潜在利益冲突。